
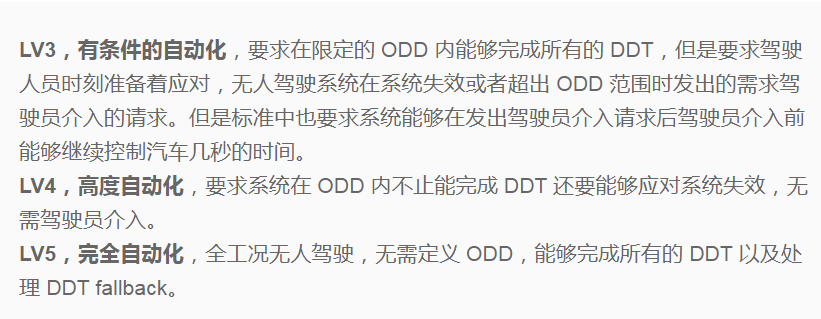
看到这个高度自动化很诧异,原来是要“应对失效”,就全自动是能处理所有问题。
我们所说的自动驾驶系统(ADS),通常是在 3~5 层级,随着层级的提高,对系统的要求也随之提高。由于目前自动驾驶的分级,特别是 L3 和 L4 处在还没有大规模应用在实际生活之中,我们对待这个需求就存在着一些认知上的争议。
分类方法:以动态驾驶任务(DDT)、DDT 的任务支援和设计运行范围来区分;
DDT(Dynamic driving task):动态驾驶任务,指汽车在道路上行驶所需的所有实时操作和策略上的功能(决策类的行为),不包括行程安排、目的地和途径地的选择等战略上的功能。
车辆执行:包括通过方向盘来对车辆进行横向运动操作、通过加速和减速来控制车辆;
感知和判断(OEDR,Object and event detection and response,也称为周边监控):对车辆纵向运动方向操作、通过对物体和事件检测、认知归类和后续响应,达到对车辆周围环境的监测和执行对应操作、车辆运动的计划还有对外信息的传递。
动态驾驶任务支援(DDTFallback):自动驾驶在设计时候,需要考虑系统性的失效(导致系统不工作的故障)发生或者出现超过系统原有的运行设计范围之外的情况,当这两者发生的时候,需给出最小化风险的解决路径。
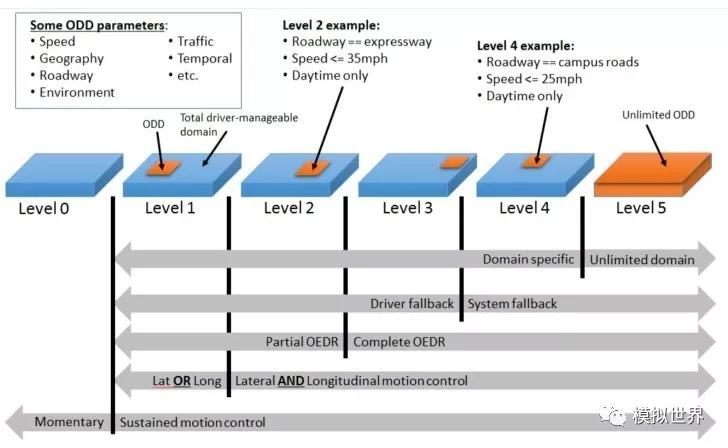
设计运行域(OperationalDesign Domain,ODD,也有称为设计适用域 或者设计运行范围)就是一组参数,指自动驾驶系统被设计的起作用的条件及适用范围,把我们知道的天气环境、道路情况(直路、弯路的半径)、车速、车流量等信息作出测定,以确保系统的能力在安全的环境之内。
综合上面的定义和分析,自动驾驶系统(ADS),通常 3~5 层级的定义可以参考下面内容。
其实只是自动化的能力级别:
自动化的能力级别分类是一个重要的概念,尤其在工业自动化、人工智能和机器人技术领域。这种分类通常用来描述系统的自主程度和复杂性。以下是一个常见的自动化能力级别分类框架,从低到高排列:
手动操作 (Manual Operation)
完全由人类操作
没有自动化元素
辅助自动化 (Assisted Automation)
人类仍然是主要操作者
系统提供一些基本的辅助功能
半自动化 (Semi-Automation)
部分任务由系统自动完成
人类需要进行监督和关键决策
条件自动化 (Conditional Automation)
系统可以在特定条件下自主运行
人类需要随时准备接管控制
高度自动化 (High Automation)
系统可以处理大多数情况
只在极少数情况下需要人类干预
完全自动化 (Full Automation)
系统可以在所有情况下自主运行
不需要人类干预
这个框架可以应用于多个领域,例如:
汽车驾驶:从手动驾驶到全自动驾驶
工业生产:从手工生产线到全自动化工厂
软件开发:从手动编码到自动代码生成
客户服务:从人工客服到全自动AI客服系统
发表回复